New areas of the application of the satellite navigation equipment appear with the development of the technology of the GNSS signal processing. Those are: GLONASS (Russia), GPS (USA) and Galileo (EU) and Beidou (China) in the future.The ordinary accuracy of the satellite navigation receiver is not sufficient in those areas. Extra accuracy is required such as several dozens of centimeters or several millimeters. Increasing of the accuracy is possible with the help of the additional information (correcting data) which allows to eliminate the errors typical for the measurement by the single GNSS receiver. These are the errors due to the receiver characteristics, satellite signals receiving and propagation conditions, errors of the time/frequency and the ephemeris supply of the satellite systems. The distance from the satellite to the GNSS receiver measured with the help of the code or phase method is the subject for the correction.
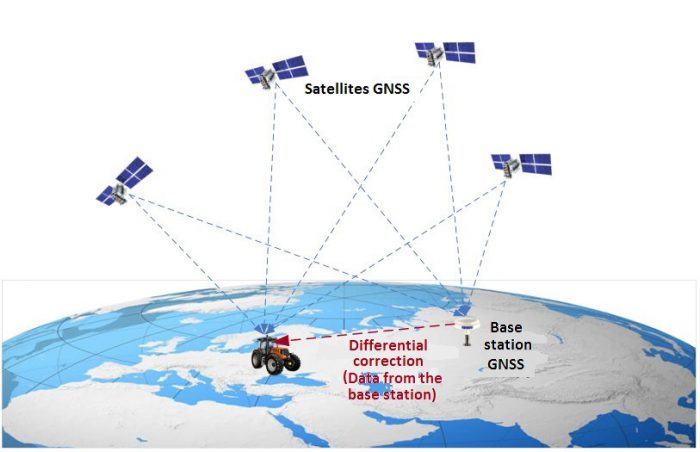
The most popular way to increase the accuracy of the GNSS positioning is the application of the method of the differential correction of the measuring GNSS information. Minimum 2 GNSS receivers are required for this method realization. One of those receivers works like a base station for the second one whose co-ordinates are necessary to be defined. The difference between the data received by the base station and by the second receiver (or the data from the receiver and the differential corrections received from the base station) is used to increase the accuracy of the navigation solution instead of the data from just one receiver.
With the such an approach all the slow changing and correlated (for 2 receivers) errors in the measuring information are compensated completely or partly so allowing to increase the accuracy of the GNSS navigation.
Most of the common GNSS receivers use only code (or radial speed) parameter measuring. Navigation solution based on such receivers has the restricted accuracy conditioned by the errors in the code measuring (in reality this accuracy is not better than 0,5 m).
GNSS equipment providing measuring of the complete carrier phase and the appropriate technologies of the differential phase correction must be used to achieve higher accuracy results in the positioning (centimeters and better). Special mathematical treatment is required for the phase differential corrections to achieve very high accuracy navigation solution. It can be done in the receiver itself or in the external computing unit.
The design of the HW/SW units and using them GNSS systems offered by our company is based on the differential phase navigation technology. The set of units is sufficient to build the precession GNSS system for any application from the very simple to rather complicated. Not expensive OEM modules (navigation, processor, communication) and our own mathematical inbuilt solution are used in the design. Our software/mathematical solution is based on the methods of the real time high accuracy phase navigation (RTK), compatible with the several operational systems and capable to resolve some specific problems depending on the application conditions.