Precession Differential Navigation Systems for the Mobile Objects
Processing of the GNSS signals from GLONASS, GPS and Galileo by the single set of the receiving equipment allows to define objects co-ordinate with the accuracy not better than 5-8 meters. Methods of the differential navigationare used to increase significantly the accuracy of the co-ordinate definition. They need minimum 2 GNSS receivers. One GNSS receiver is a part of the base equipment and forms the differential corrections for the second receiver which is installed at the mobile object.
The set of equipment for the high accuracy navigation “Farwater” allows to solve several problems related to monitoring, navigation and control of the mobile objects:
- Definition of the co-ordinates, speed and the direction of movement (using the correcting information from the base unit);
- Sending the information about the movement parameters to the external interface and to the remote Control Center;
- Definition and sending to the automatic control system of the parameters of the declination from the given rout and approaching to the programmed boarder;
- Setting one-to-one conversion into the custom co-ordinate system, to fix the frame of references to the local map;
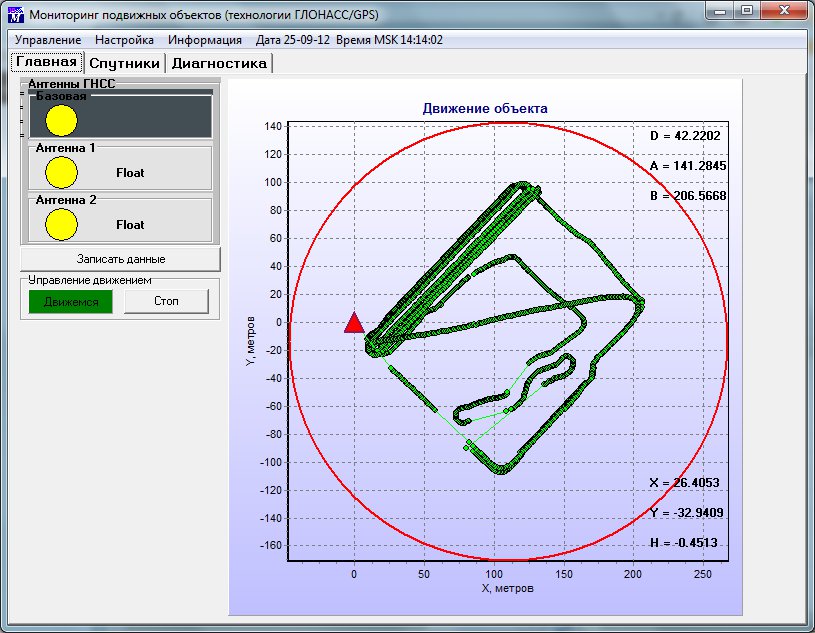
- Numeric and graphical presentation of the object trajectory and keeping the log.
Typical set of equipment for the high accuracy navigation:
- Base unit (installed on the static basis);
- Mobile unit (with 1-3 GNSS antennas);
- Software to program and control the system and to present the data on the screen (optional);
- Link and power supply equipment.

Typical accuracy of the navigation with this set of equipment – 1-2 cm.