Программное обеспечение «Мониторинг подвижных объектов» предназначено для управления системой высокоточной дифференциальной навигации подвижных объектов по сигналам глобальных навигационных спутниковых систем (ГЛОНАСС, GPS, Galileo), отображения траекторий движения, и сохранения результатов для последующего анализа.
Программное обеспечение предназначено для приема потока данных от мобильного блока комплекта оборудования высокоточной навигации, визуализации данных о движении объекта в заданной системе координат, формирования сообщений оператору о возникновении особых ситуаций, архивирования информации о движении объекта, удаленного управления параметрами работы системы, настройки конфигураций и режимов ее работы.
Программное обеспечение позволяет:
принимать данные от мобильного блока системы высокоточной навигации и декодировать их в соответствии с установленным протоколом обмена;
управлять режимами работы системы;
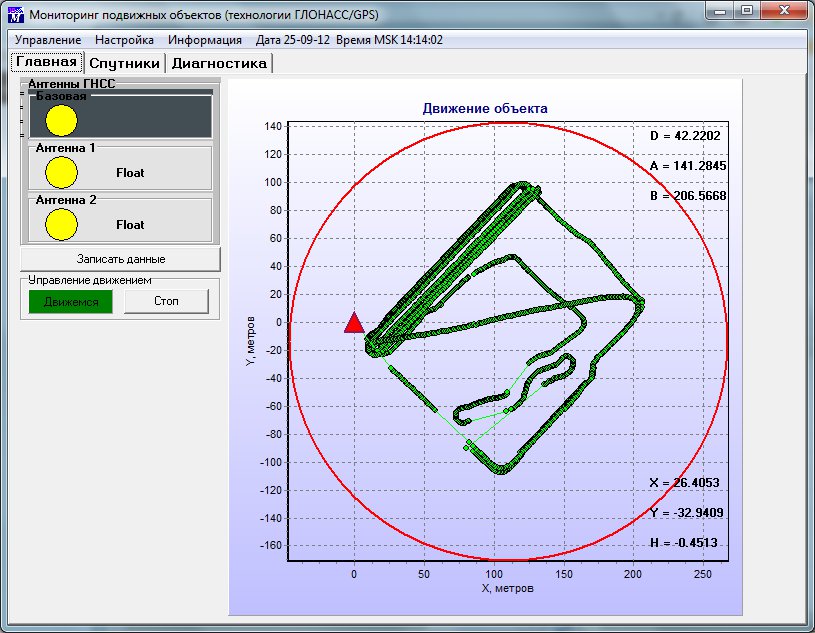
отображать в реальном времени в графическом и числовом виде взаимное положение базовой и мобильных антенн ГНСС, траектории движения объектов в заданной системе координат, ориентацию объекта в пространстве;
осуществлять мониторинг спутниковой обстановки в местах размещения базовой, и мобильных антенн;
производить автоматический анализ текущей спутниковой обстановки и возможного влияния внешних факторов, диагностику работы оборудования и программного обеспечения спутниковых навигационных модулей;
вести журнал событий;
сохранять архивы данных о траекториях движения объектов в текстовом и бинарном формате; проигрывать записанные данные;
осуществлять обновление встроенного программного обеспечения процессорного модуля.